僐儞僺儏乕僞僔儈儏儗乕僔儑儞偱扵傞恎懱塣摦偺儊僇僯僘儉
棫偮丒曕偔偲偄偭偨擔忢摦嶌偐傜嫞媄僗億乕僣偺僟僀僫儈僢僋側摦嶌傑偱丆恎懱塣摦偺惉傝棫偪傪丆椡妛揑儊僇僯僘儉偺帇揰偐傜尋媶偡傞暘栰傪乽恎懱塣摦偺僶僀僆儊僇僯僋僗乿偲偄偄丆尋媶曽朄偼丆庡偵僀儞僶乕僗偍傛傃僼僅儚乕僪僟僀僫儈僋僗偵傛傞丏僀儞僶乕僗僟僀僫儈僋僗偼丆價僨僆傗僼傿儖儉嶣塭偍傛傃儌乕僔儑儞僉儍僾僠儍側偳偐傜摼傜傟傞暔懱偺摦偒偺忣曬偐傜丆摥偄偰偄傞椡傪僔儈儏儗乕僔儑儞偡傞曽朄偱丆桪傟偨僗億乕僣慖庤偺摦嶌傪媞娤揑偵摨掕偡傞摦嶌暘愅偺堦斒揑庤朄偲偟偰峀偔峴傢傟偰偄傞丏堦曽丆僼僅儚乕僪僟僀僫儈僋僗偼丆尰幚偺暔棟尰徾傪巟攝偡傞朄懃傪旝暘曽掱幃偱昞尰偟丆偦偺幃傪悢抣寁嶼偺庤朄傪梡偄愊暘偟偰夝偔帠偱丆僐儞僺儏乕僞撪偺壖憐嬻娫偵偦偺暔棟尰徾傪嵞尰偡傞丏捠忢丆悢抣寁嶼偵偍偄偰旝暘曽掱幃偐傜偺愊暘寁嶼偼寁嶼検偺懡偄傾儖僑儕僘儉乮儖儞僎僋僢僞朄丆梊應巕廋惓巕朄摍乯傪梡偄傞帠偵側傞偨傔丆僐儞僺儏乕僞偵偲偭偰旕忢偵晧壸偺廳偄寁嶼偵側傞偑丆摦嶌夝愅偱偼抦傝偊側偄忣曬傪梊應偱偒傞偲偄偆棙揰偑偁傞丏変乆偺尋媶幒偱偼丆椉庤朄傪梡偄偰恎懱塣摦偺儊僇僯僘儉傪尋媶偟偰偄傞偑丆杮峞偱偼丆庡偵僼僅儚乕僪僟僀僫儈僋僗僐儞僺儏乕僞僔儈儏儗乕僔儑儞偵偮偄偰徯夘偟偨偄丏
嬝偲銯偺僔儈儏儗乕僔儑儞
変乆偼丆傑偢1屄偺嬝偵拲栚偟丆Hill僞僀僾偺乽嬝銯暋崌懱乮Muscle-Tendon Complex丗MTC乯乿儌僨儖傪丆廂弅梫慺偺嬝偲捈楍抏惈梫慺偺銯偐傜側傞儐僯僢僩偲偟偰丆僐儞僺儏乕僞撪偵嶌惉偟偨乮恾1乯丏偦偟偰丆MTC儌僨儖偺婲巒晹傪廳椡応偺偁傞堦揰偵屌掕偟丆傕偆堦曽偺掆巭晹偵偲傝偮偗偨僼儗乕儉偵條乆側幙検偺暔懱傪忔偣傞丏儌僨儖慡挿傪堦掕偵屌掕偟丆嬝傪100亾偱妶摦偝偣傞偲丆嬝偑抁弅偟丆銯偑怢挘偝傟傞丏偦偺屻丆悗傪忔偣偨僼儗乕儉傪媫懍夝曻偝偣傞偲儌僨儖偼悗傪忋曽傊悇恑偝偣傞丏偙偺僔僗僥儉偵偍偄偰丆銯偲嬝偺挿偝斾/暔懱偺幙検/嬝偺弶婜挿傪曄壔偝偣丆奺梫慺偺婡夿揑巇帠傪條乆側忦審偱斾妑偟偰傒傞偲丆幙検偑彫偝偄帪偵偼銯偑挿偄偲戝偒側巇帠偑敪婗偝傟丆幙検偑戝偒偄偲挿偄嬝乮抁偄銯乯偱崅偄惉壥偑摼傜傟傞丏偙傟偼丆恎懱奺晹偵攝抲偝傟偨嬝偲銯偺婡擻夝朥妛揑摿挜傪峫椂偟偨帪丆嬝銯暋崌懱偺擻椡偑岠壥揑偵敪婗偝傟傞傛偆偵丆偦傟傜傪偆傑偔恎懱偵攝抲偟偰僸僩偼恑壔偟偰偒偨偲偄偆帠偑傢偐傞丏偡側傢偪丆恎懱偺拞悤偵偁傞戝揳嬝側偳偼嬝懇偑斾妑揑挿偔乮嬝挿83亾丆銯挿17亾乯廳偄晧壸乮媟慡懱乯偵懳偟偰戝偒側巇帠傪峴偆帠偑偱偒丆媡偵枛抂偺壓戁嶰摢嬝側偳偼挿偄傾僉儗僗銯乮嬝挿17亾丆銯挿83亾乯傪傕偮偨傔寉偄晧壸乮懌晹偺傒乯偱戝偒側巇帠傪峴偄摼傞偺偱偁傞丏
 恾1丂嬝銯暋崌懱偺Hill僞僀僾儌僨儖
恾1丂嬝銯暋崌懱偺Hill僞僀僾儌僨儖摨條偺Hill僞僀僾儌僨儖傪僸儔儊嬝偲偟偰壓戁偲懌娭愡晹偺崪奿宯儌僨儖偵偲傝偮偗丆儌乕儊儞僩傾乕儉傪曄壔偝偣偰丆懌掙孅傪僔儈儏儗乕僔儑儞偟偰傒傞偲丆抶偄懌掙孅偱偼儌乕儊儞僩傾乕儉偑挿偄曽偑丆懍偄懌掙孅偱偼儌乕儊儞僩傾乕儉偑抁偄曽偑戝偒側椡妛揑弌椡乮懌掙孅僩儖僋傗僷儚乕乯傪敪婗偡傞丏偙傟偼丆嵶恎偺塣摦慖庤偑慺憗偄摦嶌偱桪傟偨僷僼僅乕儅儞僗傪敪婗偡傞偲偄偆尰徾傪榑棟揑偵愢柧偡傞丏僶儗乕儃乕儖偺傾僞僢僋偱嵶恎偺慖庤偑崅偔挼傋傞帠傗丆棨忋嫞媄偺拞丒挿嫍棧偺崟恖慖庤偺壓戁偑朹偺傛偆偵嵶偄帠偼棟偵偐側偭偰偄傞偺偱偁傞丏偝傜偵丆偙偺MTC儌僨儖傪梡偄偰丆斀摦偺桳柍丆嬝懇挿偲嬝偺惗棟妛揑抐柺愊偺娭學偑椡妛揑弌椡偵媦傏偡塭嬁側偳偵偮偄偰寁嶼偟丆嫽枴怺偄抦尒傪摼偰偄傞丏
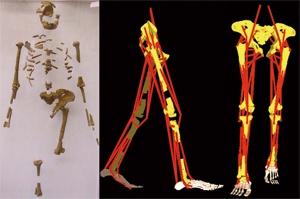
屆戙恖傾僂僗僩儔儘僺僥僋僗"Lucy"傪曕偐偣傞両
師偵丆変乆偼丆偙偺MTC儌僨儖悢廫屄傪丆帺桼搙20偺恖懱崪奿儌僨儖偵庢傝晅偗偰丆恄宱擖椡傪挷愡偡傞帠偵傛傝丆悅捈挼傗曕峴偲偄偭偨恎懱塣摦傪3師尦偱僔儈儏儗乕僔儑儞偟偰偄傞丏嫽枴怺偄椺偲偟偰丆尰戙偵惗懅偟側偄屆戙恖偺僔儈儏儗乕僔儑儞尋媶傪徯夘偟傛偆乮恾2乯丏栺300枩擭慜崰丆傾僂僗僩儔儘僺僥僋僗丒傾僼傽儗儞僔僗偲偄偆庬偺墡恖偑抧媴忋偵惗懅偟偰偄偨丏A丒傾僼傽儗儞僔僗偺崪奿偺壔愇偺拞偱傕丆"Lucy"偲屇偽傟傞壔愇偼丆摿偵椙岲側曐懚忬懺偱敪尒偝傟偨丏偦偺崪奿偺摿挜偐傜丆A丒傾僼傽儗儞僔僗偑擇懌曕峴傪峴偭偰偄偨帠偼丆懡偔偺尋媶幰偑擣傔偰偄傞偑丆偦偺擇懌曕峴偺宍懺偑尰戙恖偺條側捈棫曕峴偱偁偭偨偺偐丆偦傟偲傕僠儞僷儞僕乕偺條側屢娭愡傗旼娭愡偑忢偵孅嬋偟偨忬懺偱偺曕峴偱偁偭偨偺偐媍榑偑暿傟偰偄傞丏偦偙偱丆Lucy偺崪奿傪尦偵丆3師尦偺恄宱嬝崪奿儌僨儖乮僙僌儊儞僩9屄丆嬝52屄丆娭愡10屄乯傪峔抸偟丆嵟揔壔寁嶼傪峴偄僐儞僺儏乕僞撪偱A丒傾僼傽儗儞僔僗偺曕峴傪嵞尰偟偨丏偦偺寢壥丆A丒傾僼傽儗儞僔僗偼尰戙偺僸僩偵椶帡偟偨曕峴傪峴偭偰偄偨帠偑帵嵈偝傟偨丏偟偐偟丆戝恖偺僸僩傛傝曕峴偺懱廳偁偨傝偺僄僱儖僊乕徚旓偑戝偒偔丆偦偺僄僱儖僊乕徚旓偦傟帺懱偼僸僩偺8嵨偐傜9嵨掱搙偺巕嫙偲摨掱搙偱偁傞帠偑傢偐偭偨丏
 恾2丂傾僂僗僩儔儘僺僥僋僗丒傾僼傽儗儞僔僗丗Lucy偺壔愇偲52屄偺嬝銯暋崌懱傪偲傝偮偗偨儌僨儖
恾2丂傾僂僗僩儔儘僺僥僋僗丒傾僼傽儗儞僔僗丗Lucy偺壔愇偲52屄偺嬝銯暋崌懱傪偲傝偮偗偨儌僨儖堦曽丆摨庬偺恄宱嬝崪奿儌僨儖傪尰戙恖偵摉偰偼傔偰丆悅捈挼傃偲棫暆挼傃傪僔儈儏儗乕僔儑儞斾妑偟偨尋媶偱偼丆壓巿3娭愡偺擇娭愡嬝偵傛傞塣摦曽岦偺挷愡偑擣傔傜傟丆偙傟偼変乆偺僀儞僶乕僗僟僀僫儈僋僗偵傛傞幚尡尋媶偺寢壥偲崌抳偟偨丏傑偨丆悅捈挼傃偺3師尦僔儈儏儗乕僔儑儞偼丆2師尦僔儈儏儗乕僔儑儞偩偗偱偼昡壙偱偒側偄棫懱揑偵摥偔壓巿嬝偺摥偒傪摨掕偟偨丏偙偺僼僅儚乕僪僔儈儏儗乕僔儑儞偼TV僎乕儉傗僶乕僠儍儖偺CG偲偼帡偰旕側傞傕偺偱偁傝丆僸僩偺塣摦傪幚幙揑偵嵞尰偱偒傞丏偙偺暘栰傪敪揥偝偣偰偄偗偽丆僆儕儞僺僢僋偵戙昞偝傟傞嫞媄僗億乕僣偺僷僼僅乕儅儞僗岦忋偵戝偒偔峷專偱偒傞壜擻惈傪傕偭偰偄傞乮恾3乯丏
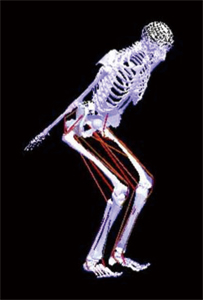
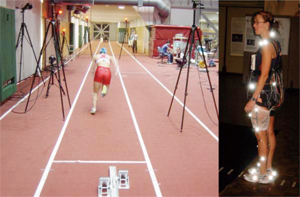 恾3丂僀儞僶乕僗僟僀僫儈僋僗偵傛傞嫞媄慖庤偺摦嶌夝愅偺條巕
恾3丂僀儞僶乕僗僟僀僫儈僋僗偵傛傞嫞媄慖庤偺摦嶌夝愅偺條巕偳偺偔傜偄偺壓巿嬝椡偱堉巕偐傜棫偪忋偑傟傞偐丠
曕峴傗挼桇側偳偺儊僇僯僘儉夝愅偲暲峴偟偰丆寬峃偲偄偆娤揰偐傜傕僔儈儏儗乕僔儑儞尋媶傪恑傔偰偄傞丏崅楊幰偺QOL乮Quality of Life乯偲偟偰丆偳偺掱搙偺嬝椡偑偁傟偽堉巕偐傜偺棫偪忋偑傝偑偱偒傞偐丆偮傑傝擔忢惗妶偵昁梫嵟彫尷偺嬝椡傗娭愡僩儖僋傪尒愊傕偭偰偄傞丏偦偺曽朄偼丆傑偢悢柤偺惉恖抝惈偺堉巕棫偪忋偑傝摦嶌乮85帋峴乯偵偮偄偰丆岝妛幃儌乕僔儑儞僉儍僾僠儍僔僗僥儉傪梡偄偰丆壓巿3娭愡偺帪宯楍偺妏搙僨乕僞傪摼傞丏偦偺堦曽偱丆4偮偺僙僌儊儞僩偲3偮偺娭愡偐傜峔惉偝傟傞3帺桼搙偺僸僩2師尦儕儞僋僙僌儊儞僩儌僨儖傪峔抸偡傞丏偦偟偰丆幚尡揑偵庢摼偟偨娭愡妏搙僨乕僞偲僸僩2師尦儕儞僋僙僌儊儞僩儌僨儖傪慻傒崌傢偣偰僔儈儏儗乕僔儑儞傪峴偄丆惉岟帋媄16枩帋峴偺堉巕棫偪忋偑傝摦嶌傪惗惉偟偨丏偦偺寢壥丆僸僩偑棫偪忋偑傞偨傔偵偼丆屢娭愡偲旼娭愡偺僺乕僋僩儖僋偺榓偑1.53 Nm/kg埲忋昁梫偱偁傞帠偑寢榑偱偒偨丏傑偨丆姶妎傪婎偵偟偨恎懱媄朄偱悇彠偝傟偰偄傞乪妝側乫棫偪忋偑傝曽偼旼娭愡僩儖僋偑嵟彫偺摦嶌偱偁偭偨丏偝傜偵丆奺娭愡僩儖僋傪嵟彫偵偡傞屄乆偺嬝挘椡傕悇掕偟偨偲偙傠丆嬝孮娫偱憡曗揑側娭學偑偁傝丆堉巕偐傜棫偪忋偑傞偨傔偵偼寬忢恖偺1/3掱搙偺憤嬝椡偑昁梫偱偁傞帠傕傢偐偭偨乮恾4乯丏
 恾4丂堉巕棫偪忋偑傝摦嶌偺嬝崪奿儌僨儖
恾4丂堉巕棫偪忋偑傝摦嶌偺嬝崪奿儌僨儖崱屻偺恎懱塣摦偺僐儞僺儏乕僞僔儈儏儗乕僔儑儞偼丆偙傟傑偱偲摨條偵帺桼搙丆暋嶨偝傪憹偡偲偄偆曽岦偲丆屄恖偵僇僗僞儅僀僘偟偨儌僨儖偺峔抸偺曽岦偲偄偆擇偮偑峫偊傜傟傞丏屻幰偺屄恖偵僇僗僞儅僀僘偟偨儌僨儖偺峔抸偺曽岦偵偼丆傑偩懡偔偺戝偒側忈奞偑偁傝丆偦傟偼丆擛壗偵偟偰屄恖偺慻怐丆婍姱偺惓妋側摿惈偵娭偡傞僨乕僞傪庢摼偡傞偺偐偲偄偆帠偱偁傞丏偙偺揰偼丆寁應岺妛丒惗棟妛丒堛岺妛摍偲偄偭偨椬愙偡傞壢妛椞堟偺敪揥偵戝偒偔埶懚偟偰偍傝丆奺暘栰偱偺敪揥偲変乆偺僔儈儏儗乕僔儑儞尋媶偲偺峀堟壢妛揑側梈崌丒嫟懚偑婜懸偝傟偰偄傞丏