赤ちゃん学とロボット学:発達認知神経科学の視座
1.なぜ赤ちゃんとロボットなのか?
赤ちゃん学とロボット工学,一見なんの縁もゆかりもなさそうである.しかし,近年これら2つの研究分野が,密かに仲良くなりつつある.特に,日本とヨーロッパでは,分野を代表する研究者がお互いの研究動向に目を配っている.まずは,その理由から述べることにしよう(詳しくは,参考文献[1]や[2]をご覧頂きたい.).
ヒューマノイドロボットが出現し始めた1990年代から2000年代にかけての数年間はロボティクスにとって変革の時期であった.それまでは,ロボットといえば,工場の生産ラインや危険な場所が主な活動範囲であり,人間とのかかわりという視点からの研究は希少であった.それが,人間と同じように2足歩行するヒューマノイドロボットが出現したことによって,日常的場面で人間と密に相互作用する「相手」としてのロボットの役割が浮上してきた.
一方,近年の認知科学では,「心の理論」,「意図の理解」,「目的の帰属」といった研究が盛んに行われている.大きく括れば,これらは他者理解の認知機能に関する研究-つまり,「人間が人間をどう認知・理解するのか」についての研究である.こうした研究は,発達的変遷と絡めて実施されることが多く,乳幼児を対象とした興味深い実証研究が多数行われている.
こうした背景にあって,我々は,他者理解の研究として,「乳児はロボットをどう捉えるのか?」/「乳児はヒトとロボットをどう区別するのか?」という視点からの研究を行っている.「人間認知」の認知機能ではなく,「ロボット認知」の認知機能について研究する意義は,近年のロボットが,振る舞いや外見の点で,人間と類似している(が,全く同じではない)ことにある.「人間認知」の認知機能について明らかにするには,「人間でないものの認知・理解」あるいは「人間とそうでないものの区別」の認知機構について研究するのが近道である.また,成人ではなく,乳児をターゲットとした実験を行うことのメリットは,ロボットに関する背景知識や固定観念を可能な限り排除することができ,「機械」と「人間」の境界に関わる根源的部分にアプローチできる点である.境界がはっきりすれば,「溝」を埋めたいロボット工学にとっても大きなメリットになる.
ここでは,我々が行った研究事例を紹介しつつ,認知科学とロボティクスの接点を俯瞰しよう.
2.ロボットはコミュニケーションの相手になり得るか?
10ヵ月の乳児がヒューマノイドロボットをコミュニケーションの対象として認識するかどうかを調べた[3].実験は,乳児研究で一般的に用いられている「期待背反法(violation of expectation)」に基づいて行われ,乳児の刺激に対する注視時間が計測された.刺激としては,ATRで開発されたヒューマノイドロボットRobovieと人間が相互作用場面の実写映像が用いられた(図1参照).
 図1 Robovieと人間の相互作用場面
図1 Robovieと人間の相互作用場面実験は,乳児にロボットに対する「背景知識」を与える約1分のファミリアリゼーションフェーズと,その背景知識のもと乳児がロボットを「話し相手」として捉えているかどうかを確かめるためのテストフェーズに分けられた.背景知識を与えられる被験児は2つのグループに分けられ,1つのグループにはファミリアリゼーションフェーズでインタラクティブなロボット(ヒトと相互作用するロボット)の映像が呈示され(interactive群),もう1つのグループにはインタラクティブでないロボットの映像が呈示された(non-interactive群).上記2群に加えて背景知識が与えられないコントロール群が設定された.
テストフェーズでは,全ての乳児に:
1.人間がロボットに話しかけている場面
2. 人間が人間に話しかけている場面
の2種類の映像刺激が交互に呈示され,それぞれに対する注視時間が計測された.
図2は,実験結果の一部をグラフで示したものである.このグラフはinteractive群,non-interactive群,コントロール群の乳児それぞれの,テストフェーズにおける平均注視時間を示している.図で青色のバーはロボットに話しかけている場面,橙色のバーは人間に話しかけている場面への平均注視時間である.
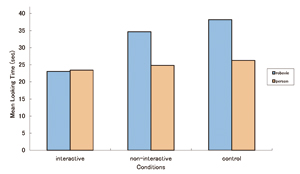 図2 実験結果(各条件におけるロボットと人への注視時間)
図2 実験結果(各条件におけるロボットと人への注視時間)このグラフから分かるように,インタラクティブなロボットがあらかじめ呈示された乳児に関しては,話し相手が人間の場合もロボットの場合も注視時間に差がないことが示された.また,インタラクティブでないロボットが背景知識として与えられた乳児に関しては,話し相手がロボットの場合への注視時間が人間の場合と比較して長いことが示された.
この実験で用いられた期待背反法は,新奇あるいは不自然な事象に対して乳児の注視時間が増加する性質を応用したものである.このロジックに従うと,ここで得られた実験結果は,10ヶ月児が,インタラクティブで「ない」ロボットに対して話しかけることは「不自然」であると捉え,インタラクティブなロボットに対して話しかけることは「自然」であると捉えていることを示唆している.つまり,ファミリアリゼーションで呈示された人間とロボットとの相互作用の仕方が,乳児のロボットに対する捉え方に影響を与えたことになる.
乳児にとってヒューマノイドロボットは,「外見」に関しても「動作」に関しても新奇な対象のはずである.詳細についてはさらに詰める必要があるが,少なくともコミュニケーションの「相手」としての判断には,単なる外見だけではなく,人間の動作や呼びかけに随伴して反応するかどうかが重要であることが示唆されたわけである.
3.展 望
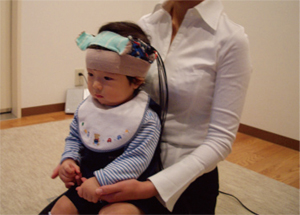 図3 NIRSを用いた乳児の脳活動計測
図3 NIRSを用いた乳児の脳活動計測ヒューマノイドロボットを用いた研究は,我々の「人性」認知に関して,興味深い結果をもたらした.人間の動きや呼びかけに随伴した反応が,乳児の「人性」認知に大きく関わっていることが明らかになったわけである.ここで紹介した乳児の行動実験以外にも,我々は,NIRS(近赤外分光法装置)やHigh-Density EEG(高密度脳波計)といった乳児から成人まで安全かつ低拘束に用いることができる脳活動計測装置を用いた研究を行っている(図3)[4].脳活動計測は,乳児・幼児・成人に一貫した指標を用いることができるという点で,注視時間に基づく行動実験を補うことができる.乳幼児における脳活動計測が順調に展開できれば,近年蓄積されつつある成人の脳機能イメージングのデータと付き合わせて,乳児の人性認知に関わる脳機能についても考察することが可能となる.今後は,「赤ちゃん学」と「ロボット工学」だけでなく「神経科学」の領域とも連携・協力していかねばならない.
人間は「人間」をどう捉えているのか?この問いに答えるためには,一つの研究分野に居座っていてはいけない.「赤ちゃん学」や「脳神経科学」,「ロボット工学」だけでなく,まだまだ多くの研究分野の協力・融合が必要となるであろう.
参考文献
[1]けいはんな社会的知能発生学研究会(編).『知能の謎−認知発達ロボティクスの挑戦』,ブルーバックス(講談社).2004.
[2]開 一夫.『日曜ピアジェ 赤ちゃん学のすすめ』,岩波科学ライブラリー(岩波書店).2006.
[3]Arita, A., Hiraki, K., Kanda, T. and Ishiguro, H. Can we talk to robots? Ten-month-old infants expected interactive humanoid robots to be talked to by persons. Cognition, 95 (3): B49-B57, 2005.
[4]Shimada, S. and Hiraki, K.: Infant’s brain responses to live and televised action. NeuroImage 32(2),930-939, 2006.